
21.02.2024 | Frederik Ramm
We’re now offering Shortbread vector tile packages on our download server. We have been doing this experimentally for a while, serving .tar.gz files, but have now switched to the more popular “mbtiles” format.
![]()
At present you will find download links for country-wide vector tile packages, except for large countries like the US where the packages are at state level. We’re looking into providing continent-wide and planet-wide downloads but these will likely utilize BitTorrent to keep some of the load off our servers.
Data is currently updated infrequently but we’ll sooner or later establish automatic, regular updating.
15.02.2024 | Frederik Ramm
Our project-internal download server which supplies OSM data with full metadata has been upgraded to use OAuth2, in anticipation of OSMF switching off their support for OAuth1.0a.

(For those who are not aware – the public “no login required” download server doesn’t publish the author and timestamp of modifications in order to be squeaky clean when it comes to data protection; the project-internal server requires an OSM login, thereby ensuring that anyone downloading data from this server has consented to OSM’s policies which, among others, include a data protection clause.)
In fact, as some of you may have noticed, we had been using OAuth1.0, not 1.0a, until now, which was unceremoniously given the boot last weekend, leading to a service interruption of a few days on the internal download server.
It’s all fixed now, and those of you who use some sort of automated download with a cookie will have to update their oauth_cookie_client.py and obtain a new cookie as documented on the GitHub page.
2.10.2023 | Frederik Ramm
The regional taginfo server at taginfo.geofabrik.de has been updated with the newest taginfo codebase which means, among other things, that you can get a “chronology” view for many tags telling you how the use of that tag changed over time.
For those of you who have used the service in the past and who were probably used to frequent “internal server errors” forcing a reload, those toothing pains should now be a thing of the past, and we’ve added direct links to the respective regions on download.geofabrik.de – taginfo should have pages for every region supported by the download server. Feel free to report any issues you still encounter.
18.09.2023 | Frederik Ramm
For quite a while now we’ve been offering a region called “Alps” on our download server and simply assigned it a rectangular bounding box. There have been some legitimate complaints about this box missing some bits in the Southwest (notably the Maritime Alps). We’re therefore changing the boundary polygon, but in order to keep the size manageable, we’re also getting rid of some of the areas that were included until now but are definitely not part of the “Alps” by any definition. Here’s the old (rectangular) and the new (potato-shaped) areas:
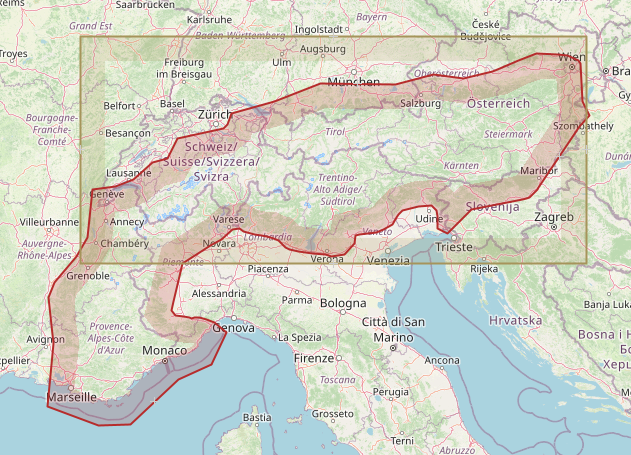
Notably the old file contained all of Bern, Zürich, Munich, Linz, Venezia, Zagreb, and Milano; these cities are not in the new “Alps” any more.
We’ll be making the change on September 25 which will lead to a relatively large diff, deleting all the stuff that isn’t in the file any more and adding all that is new. If you somehow rely on the old polygon, you’ll have to stop updating now.
30.03.2023 | Frederik Ramm
We’ve started making vector tile packages available on our download server at download.geofabrik.de. At the moment you’ll find a .tar.gz file with vector tiles typically on the same level where you’d also find shape files — i.e. we don’t give you a package for all of Europe, but for individual European countries, and we don’t have a package for all of the US, but for individual states and so on.
These vector tiles use our Shortbread schema, and we create them with the excellent open source Tilemaker software. For suitable MapLibre vector styles, have a look at the VersaTiles repository.
This is supposed to be an experiment and we don’t yet make any promises about the structure and update frequency of this offer. We’re happy to hear your ideas though. At present, the .tar.gz files simply contain all vector tiles for the region as simple files (which are themselves .gz compressed so you might have to instruct your web server to add the appropriate encoding headers).
Like everything else on our download server, these tiles are made from OpenStreetMap data and come under Open Database License 1.0 with an OpenStreetMap attribution requirement.