
26.06.2025 | Amanda McCann
Geofabrik is pleased to support the OpenStreetMap community as a bronze sponsor of two upcoming conferences in 2025:
We have been regular sponsors of SotM events for many years, including regional conferences such as FOSSGIS. Our staff have also contributed by speaking at various sessions over time.
Events like SotM offer a useful opportunity for exchange within the OpenStreetMap ecosystem. While much of the work in the OSM world happens remotely, occasional in-person meetings remain valuable for maintaining collaboration and perspective.
Sponsorship opportunities are still available for both events for those interested in supporting the community.
3.04.2025 | Frederik Ramm
In der letzten Woche waren drei von uns – Amanda, Michael und Frederik – auf der FOSSGIS-Konferenz in Münster. (Die Geofabrik ist auch Sponsor der FOSSGIS-Konferenz.) Die Veranstaltung, die jedes Jahr interessante Vorträge und Gespräche rund um alles im Open-Source-GIS-Bereich bietet, hatte dieses Mal rund 750 Besucher:innen und fand in den denkmalgeschützten Räumen im Schloss statt.
Alle Vorträge wurden vom CCC-Videoteam aufgezeichnet und können auf https://media.ccc.de/c/fossgis2025 angesehen werden. Amanda hat über ihr Projekt WaterwayMap gesprochen; Michaels Thema war, wie man in Deutschland noch neue Mapping-Aufgaben findet, und Frederik hat einen neuen OSM-Datenabfragedienst namens Postpass vorgestellt.
Der FOSSGIS e.V. hat auf seiner Mitgliederversammlung beschlossen, dass er Unternehmen und andere Organisationen, die OpenStreetMap nutzen, als „Förderer“ gewinnen will, um mehr Planungssicherheit für seine OpenStreetMap-Aktivitäten zu erreichen. Die Geofabrik hat natürlich gleich ja gesagt – wir sind die ersten! Unterstützen auch Sie die wertvolle OSM-Arbeit des FOSSIGS e.V., indem Sie Förderer werden.
21.03.2025 | Frederik Ramm
We’re happy to announce that we now have a nice public transport map, courtesy of Melchior Moos who runs the original öpnvkarte.de web site. Geofabrik now hosts its own version of that original “ÖPNVKarte” (“ÖPNV” is the German acronym for public transport), and we’ll be offering it to international customers under the somewhat simpler name “Public Transport Map”.
We’ll also approach the OpenStreetMap operations team and recommend this map for inclusion on www.openstreetmap.org which has featured ÖPNVKarte for a long time and only recently dropped it due to operational concerns.
This public transport map currently relies on a proprietary database importer written by Melchior Moos, but using the work contributed by our recent Geofabrik intern Max Hoogerdijk, we’re planning to publish import scripts compatible with osm2pgsql’s Themepark import mechanism under an open source license soon.
13.11.2024 | Frederik Ramm
We frequently receive requests from researchers about “old” OpenStreetMap data. In one instance we’ve been asked whether we could provide data for a city road grid – for the year 1980! So let’s take a minute to explain what is possible and what isn’t.
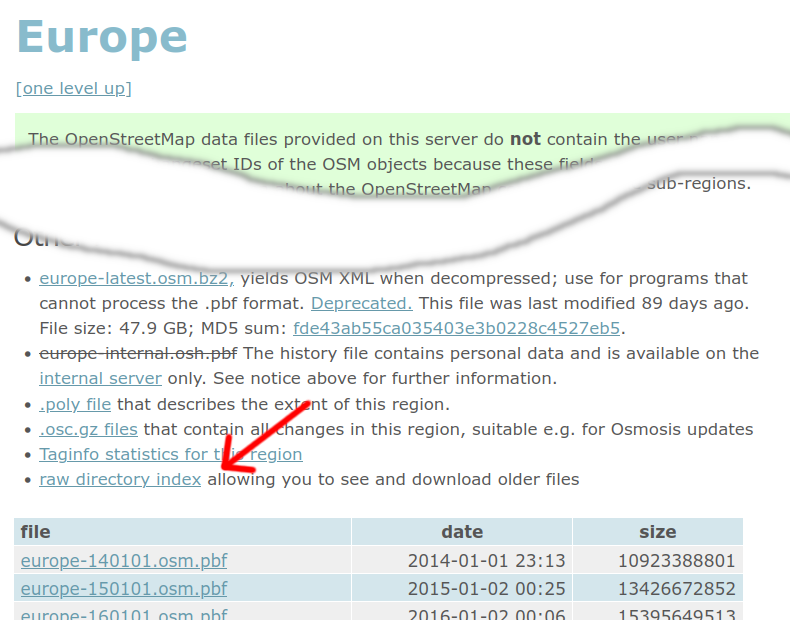
In general, you can download older data files – for the 1st of January of each year – from our download server. Just click on the “raw directory index” link and you’re presented with a list of available files – either .osm.pbf or shape files. Sometimes when we’ve split up a country in smaller regions at some point, you might only find more recent files for the small regions, but older files for the whole country.
OpenStreetMap keeps a full history of everything, so it is possible to extract even more fine-grained snapshots – say for the 1st of each month since 2014! This will require the “osmium” utility (with its –time-filter option), as well as a “full history” file. Such files are available (for the whole world) from planet.openstreetmap.org, but also for individual continents or countries from our project-internal download server. (Because these files contain metadata that may be personal data, access is only allowed with an OSM login.)
There are a number of caveats that apply to working with historic OSM data though. First and foremost: An OSM data set of time X tells you what OSM knew about the world at that time – and not what the world was like at that time. If a building has been there for 100 years but was only added to OSM in 2020, then the 2018 data set will not contain that building. You can get an idea of what to expect in an old OSM data set from the “chronology” tab of the taginfo service (globally at taginfo.openstreetmap.org, or for individual regions at taginfo.geofabrik.de). Here’s a graph of the “building” tag for Spain:
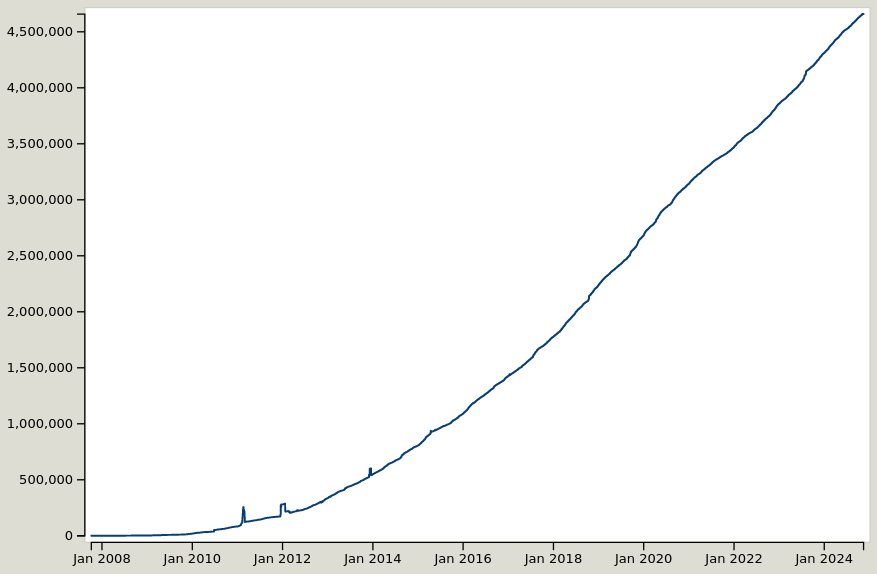
As you can see, OSM currently has about 4.5 million building objects in Spain, and in 2014 we had about 450,000. Does that mean that 90% of Spain’s buildings have been erected in the last 10 years? No – it only means that OSM was much smaller in 2014 than it is today!
Because OpenStreetMap was invented in 2004, obviously any data export for any time before 2004 will be completely empty. In the early years we also had a few incompatible data model changes, and the license change in 2012 meant that some data had to be removed again. So, going back further than the license change will really give you very patchy results, and is not recommended for most use cases.
Another thing to consider is that in some areas the mapping methods have changed, and something that was mapped as X in 2014 might today be Y. Depending on what research you are doing, it might be necessary to adapt your filters to that.
If you would like to enlist our help in extracting historic information from OpenStreetMap, we’re happy to make you an offer.
21.02.2024 | Frederik Ramm
We’re now offering Shortbread vector tile packages on our download server. We have been doing this experimentally for a while, serving .tar.gz files, but have now switched to the more popular “mbtiles” format.
![]()
At present you will find download links for country-wide vector tile packages, except for large countries like the US where the packages are at state level. We’re looking into providing continent-wide and planet-wide downloads but these will likely utilize BitTorrent to keep some of the load off our servers.
Data is currently updated infrequently but we’ll sooner or later establish automatic, regular updating.
15.02.2024 | Frederik Ramm
Our project-internal download server which supplies OSM data with full metadata has been upgraded to use OAuth2, in anticipation of OSMF switching off their support for OAuth1.0a.

(For those who are not aware – the public “no login required” download server doesn’t publish the author and timestamp of modifications in order to be squeaky clean when it comes to data protection; the project-internal server requires an OSM login, thereby ensuring that anyone downloading data from this server has consented to OSM’s policies which, among others, include a data protection clause.)
In fact, as some of you may have noticed, we had been using OAuth1.0, not 1.0a, until now, which was unceremoniously given the boot last weekend, leading to a service interruption of a few days on the internal download server.
It’s all fixed now, and those of you who use some sort of automated download with a cookie will have to update their oauth_cookie_client.py and obtain a new cookie as documented on the GitHub page.
2.10.2023 | Frederik Ramm
The regional taginfo server at taginfo.geofabrik.de has been updated with the newest taginfo codebase which means, among other things, that you can get a “chronology” view for many tags telling you how the use of that tag changed over time.
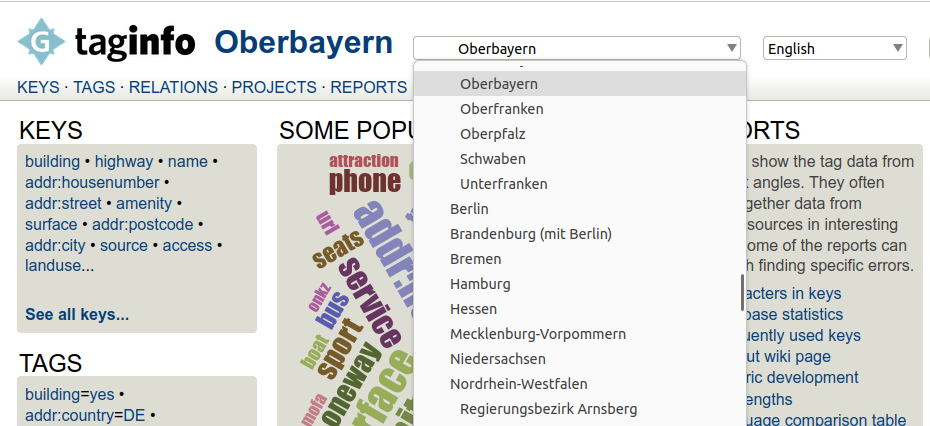
For those of you who have used the service in the past and who were probably used to frequent “internal server errors” forcing a reload, those toothing pains should now be a thing of the past, and we’ve added direct links to the respective regions on download.geofabrik.de – taginfo should have pages for every region supported by the download server. Feel free to report any issues you still encounter.
18.09.2023 | Frederik Ramm
For quite a while now we’ve been offering a region called “Alps” on our download server and simply assigned it a rectangular bounding box. There have been some legitimate complaints about this box missing some bits in the Southwest (notably the Maritime Alps). We’re therefore changing the boundary polygon, but in order to keep the size manageable, we’re also getting rid of some of the areas that were included until now but are definitely not part of the “Alps” by any definition. Here’s the old (rectangular) and the new (potato-shaped) areas:
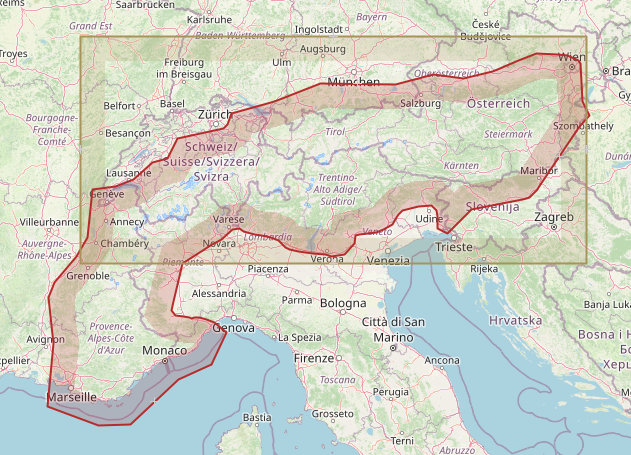
Notably the old file contained all of Bern, Zürich, Munich, Linz, Venezia, Zagreb, and Milano; these cities are not in the new “Alps” any more.
We’ll be making the change on September 25 which will lead to a relatively large diff, deleting all the stuff that isn’t in the file any more and adding all that is new. If you somehow rely on the old polygon, you’ll have to stop updating now.
30.03.2023 | Frederik Ramm
We’ve started making vector tile packages available on our download server at download.geofabrik.de. At the moment you’ll find a .tar.gz file with vector tiles typically on the same level where you’d also find shape files — i.e. we don’t give you a package for all of Europe, but for individual European countries, and we don’t have a package for all of the US, but for individual states and so on.
These vector tiles use our Shortbread schema, and we create them with the excellent open source Tilemaker software. For suitable MapLibre vector styles, have a look at the VersaTiles repository.
This is supposed to be an experiment and we don’t yet make any promises about the structure and update frequency of this offer. We’re happy to hear your ideas though. At present, the .tar.gz files simply contain all vector tiles for the region as simple files (which are themselves .gz compressed so you might have to instruct your web server to add the appropriate encoding headers).
Like everything else on our download server, these tiles are made from OpenStreetMap data and come under Open Database License 1.0 with an OpenStreetMap attribution requirement.
29.03.2023 | Frederik Ramm
This weekend we’ll implement a change that affects the handling of boundary-straddling multipolygons in our OSM extracts. (See this 2017 blog article for some background.)
We’ll stop completing cross-border multipolygons except landuse polygons and a hand-picked list of natural polygons (e.g. water, grassland, wetland).
This has become necessary because of the propensity of OSM mappers to create huge multipolygons like “the Iberian penisula” or “the Alps”, artifacts that not only unnecessarily increase the data volume of any given PBF but also have unexpected consequences – for example, for a while anyone processing the rivers of the Switzerland extract would find a stretch of the River Danube in Vienna, because it happened to be part of the outline of the “Alps” multipolygon.
We hope that by restricting multipolygon completion to landuse and a small list of natural polygons we’ll be able to curb these unexpected side effects of polygon completion.
As a result of this change, the .osc.gz files generated on Friday night will contain “delete” operations for ways and nodes that were heretofore contained in the extracts due to multipolygon completion, but are not any longer.
Some data extracts, notably those for small islands or archipelagos, will shrink by more than 10%, but for most extracts the size will not be affected dramatically.