
30.06.2026 | Michael Reichert
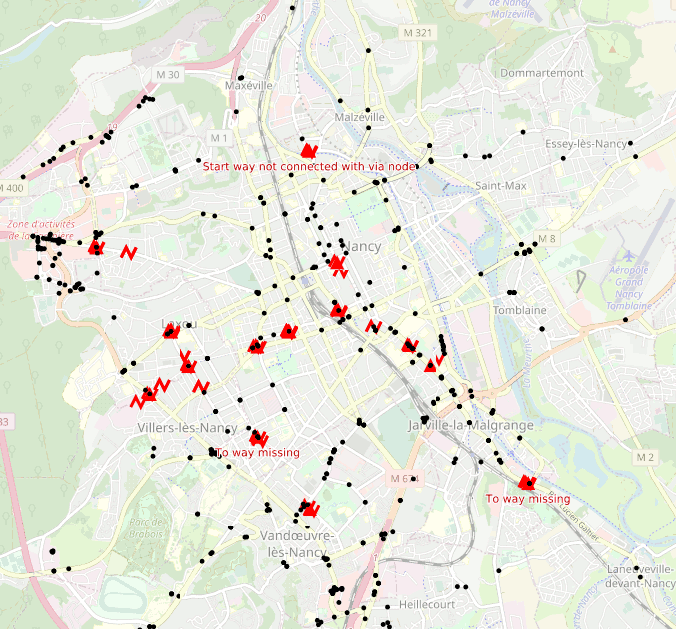
We’ve added a new turn restrictions view to OSM Inspector showing (almost) all restrictions and highlighting invalid ones.
There are some turn restriction validators around already but they tend to be based on live Overpass queries and therefore are negatively affected by recent performance issues.
The turn restriction validator we have added to our tool osmi_simple_views (which already creates the tagging, highways, geometry and places views from an up-to-date copy of the OpenStreetMap planet dump) does not require Overpass but instead writes its results to SQlite files in one go. These are then served to OSMI users as a slippy map (currently using Mapserver but this is subject to change as we’re preparing a move to vector tiles).
The code validates the number, types and roles of relation members. Tag values are checked except for conditional restrictions, no_entry and no_exit restrictions.
We hope that you find this validator useful in improving the quality of OpenStreetMap data in your region.
See the wiki page for a description of all potential validation errors and suggestions how to fix them, and feel free to open an issue on GitHub if you find something amiss.
7.04.2026 | Frederik Ramm
We’ve recently added GeoPackage (gpkg) files to the download server, in addition to the shape files we’re already offering. This seems to be a popular addition; over half of the previous shape file download traffic has already migrated to the newer GeoPackage format – combining all layers in a single file, GeoPackage is more convenient than the old shape format.
But there’s more: We have updated the layer structure in the shape and GeoPackage files to include more data. You can review the details in our format specification PDF; the most important news is that the free data sets now contain an administrative area layer which was previously only available in the paid data sets*.
We’ve also added a protected areas layer and many POIs, but taken great care not to upset things too much so that people shouldn’t have to re-tool their processing chains built for previous versions of our shape files. Enjoy!
(*) Note that OSM doesn’t have a hierarchy of admin levels (i.e. city X is in county Y is in state Z) by default, and neither are boundaries clipped along the coastline. Administrative area shape files that have these extra features are available from us commercially.
21.01.2026 | Michael Reichert
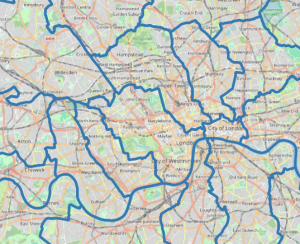
Today we added a new view to OSM Inspector rendering postal code boundaries.
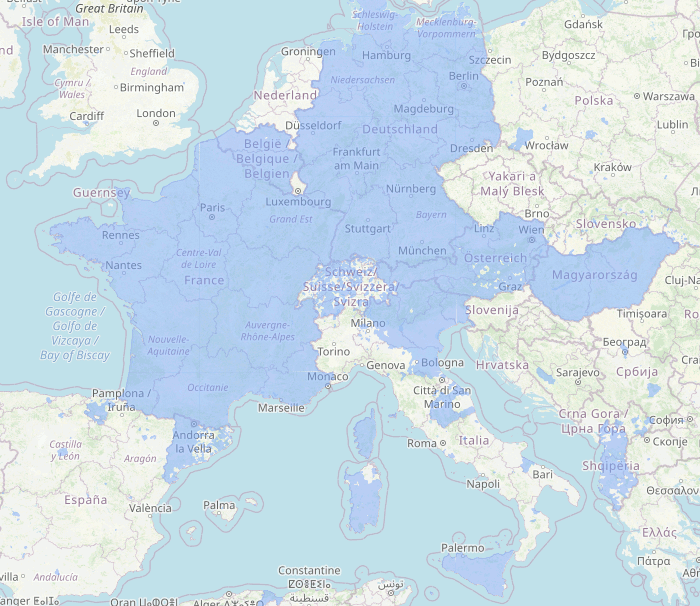
In some regions, mappers map postcodes not only as tags on objects with an address (addr:postcode=*), but also in the form of postcode polygons.
The new view supports this endeavour by helping mappers see where postcodes are missing and where existing postcode areas overlap. As a side effect, it’s something we can show a potential customer when they come asking for “global postcode boundaries” – the view makes it clear what you can expect from OSM and what you can’t.
Postcode coverage is shown in semi-opaque blue. Polygons which overlap each other are yellow. Most of these are cases where both the administrative boundary and a second boundary object have a postal_code=* tag.
If postal_code=* is used on a polygon without boundary=*, it will appear as dark blue (low zoom) or orange lines (larger zoom level).
Keep in mind that OpenStreetMap primarily aims to collect ground truth. Administrative boundaries are an exception to this rule because they are considered relevant enough to include even if they cannot be observed on the ground. Post code boundaries are considered mappable in some regions and not so much in others – don’t go round adding post code boundaries in your area if the community doesn’t agree. Some countries have no postcodes at all or have postcode systems which cannot be modelled as polygons (e.g. Ireland). Therefore, there will never be a complete coverage.
The source code for the postcode view is on Codeberg.
13.01.2026 | Michael Reichert
If you render maps using the Mapnik rendering engine, you might have come across Nik4 by Ilya Zverev. It is a Python utility rendering single map images for a given bounding box, center coordinate, image dimensions and/or scale. At Geofabrik we use it to create maps for printouts.
Nik4 has one problem. It relies on Mapnik’s Python bindings. They do not have any releases and fail to build from time to time. In order to get rid of that unstable dependency, we decided to port Nik4 to C++ because Mapnik is written in C++.
Nik5 aims to behave exactly as Nik4 in order to make migration easy for its users. However, the syntax of the command line options --bbox, --size-px and --size was changed from space to comma as separator. If you wrote --size-px 800 600 in the past, you now have to use --size-px 800,600.
Nik4 used ImageMagick’s montage utility to stitch tiles together if the requested map size exceeded the maximum image limits of Mapnik. We replaced it by the libgd. Tiles will be stored in memory now and not stored as temporary files on disk.
If you render large images beyond Mapnik’s limits, you will appreciate the new --tile-buffer option. It will render all tiles with a buffer to avoid labels being cut at tile boundariess.
The code is published on Codeberg.
10.09.2025 | Frederik Ramm
This month we’ve ramped up the infrastructure behind the download server, and downloads should now be available earlier
and faster. There’s also a small technical change in that requests for a “…latest” file will now be answered with a
HTTP redirect to the specific latest version (see previous blog post).
I would like to use this opportunity to appeal to users of the download server to “download responsibly”. We want
to continue offering this service as powerful and as convenient as possible within our means. We want everyone
to have easy access to the latest OSM data in a form that is useful to them.
Every now and then, people break things for others. There have been individual clients downloading the exact same
20-GB file 100s of times per day, for several days in a row. (Just the other day, one user has managed to download almost 10,000 copies of the italy-latest.osm.pbf file in 24 hours!) Others download every single file we have on the
server, every day. There’s a limit to the outgoing network bandwidth, and behaviour like this means that
things are slowing down for everyone. Also, when we block an IP range for abuse, innocent third parties can be affected.
Here’s three concrete appeals to users of the download server:
1. If you want data for the whole planet, don’t download it piecemeal from us – simply get the planet file from planet.openstreetmap.org and you’re done!
2. If you want a large region (like Europe or North America) updated daily, use the excellent pyosmium-up-to-date program which will automatically determine the age of your local file and update it by downloading the latest changes; this saves something like 98% of network traffic compared to a fresh download, and is faster.
3. If you automate anything with regard to our download server, monitor what your script is doing or build in appropriate catches so that you don’t end up downloading the same file 1000 times just because your disk is full or something like that.
Happy downloading!
24.07.2025 | Frederik Ramm
The Geofabrik dowload server is a wildly popular service that each month pushes out about 400 TB of OpenStreetMap data to users around the world – most of that in the form of country or regional .osm.pbf files. We publish these files with a date in the filename (e.g. germany-250723.osm.pbf) but for convenience we also have a downloadable file like “germany-latest.osm.pbf” that always gives you the most recent version.
Keeping these two as separate files does, however, interfere with caching; the proxies we use to speed up the download offering don’t know that “something-250723” and “something-latest” are the same file so they need to retrieve them both.
Starting 01 September, we’ll change this in line with best practices, and send a HTTP redirect if you request a “latest” file. The redirect then points the client to the appropriate URL with a data embedded in the file name. This should be transparent for most use cases, however if you have some sort of setup that does not follow HTTP redirects you might have to modify that. wget will follow redirects by default, whereas curl requires the command line flag -L.
26.06.2025 | Amanda McCann
Geofabrik is pleased to support the OpenStreetMap community as a bronze sponsor of two upcoming conferences in 2025:
We have been regular sponsors of SotM events for many years, including regional conferences such as FOSSGIS. Our staff have also contributed by speaking at various sessions over time.
Events like SotM offer a useful opportunity for exchange within the OpenStreetMap ecosystem. While much of the work in the OSM world happens remotely, occasional in-person meetings remain valuable for maintaining collaboration and perspective.
Sponsorship opportunities are still available for both events for those interested in supporting the community.
3.04.2025 | Frederik Ramm
In der letzten Woche waren drei von uns – Amanda, Michael und Frederik – auf der FOSSGIS-Konferenz in Münster. (Die Geofabrik ist auch Sponsor der FOSSGIS-Konferenz.) Die Veranstaltung, die jedes Jahr interessante Vorträge und Gespräche rund um alles im Open-Source-GIS-Bereich bietet, hatte dieses Mal rund 750 Besucher:innen und fand in den denkmalgeschützten Räumen im Schloss statt.
Alle Vorträge wurden vom CCC-Videoteam aufgezeichnet und können auf https://media.ccc.de/c/fossgis2025 angesehen werden. Amanda hat über ihr Projekt WaterwayMap gesprochen; Michaels Thema war, wie man in Deutschland noch neue Mapping-Aufgaben findet, und Frederik hat einen neuen OSM-Datenabfragedienst namens Postpass vorgestellt.
Der FOSSGIS e.V. hat auf seiner Mitgliederversammlung beschlossen, dass er Unternehmen und andere Organisationen, die OpenStreetMap nutzen, als „Förderer“ gewinnen will, um mehr Planungssicherheit für seine OpenStreetMap-Aktivitäten zu erreichen. Die Geofabrik hat natürlich gleich ja gesagt – wir sind die ersten! Unterstützen auch Sie die wertvolle OSM-Arbeit des FOSSIGS e.V., indem Sie Förderer werden.
21.03.2025 | Frederik Ramm
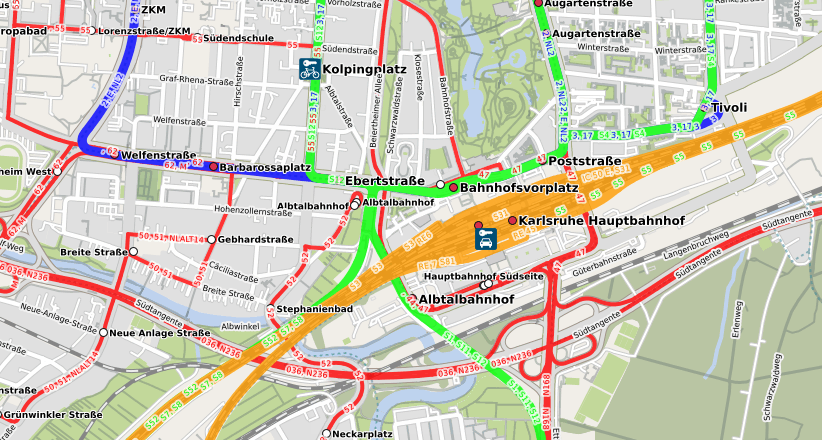
We’re happy to announce that we now have a nice public transport map, courtesy of Melchior Moos who runs the original öpnvkarte.de web site. Geofabrik now hosts its own version of that original “ÖPNVKarte” (“ÖPNV” is the German acronym for public transport), and we’ll be offering it to international customers under the somewhat simpler name “Public Transport Map”.
We’ll also approach the OpenStreetMap operations team and recommend this map for inclusion on www.openstreetmap.org which has featured ÖPNVKarte for a long time and only recently dropped it due to operational concerns.
This public transport map currently relies on a proprietary database importer written by Melchior Moos, but using the work contributed by our recent Geofabrik intern Max Hoogerdijk, we’re planning to publish import scripts compatible with osm2pgsql’s Themepark import mechanism under an open source license soon.
13.11.2024 | Frederik Ramm
We frequently receive requests from researchers about “old” OpenStreetMap data. In one instance we’ve been asked whether we could provide data for a city road grid – for the year 1980! So let’s take a minute to explain what is possible and what isn’t.
In general, you can download older data files – for the 1st of January of each year – from our download server. Just click on the “raw directory index” link and you’re presented with a list of available files – either .osm.pbf or shape files. Sometimes when we’ve split up a country in smaller regions at some point, you might only find more recent files for the small regions, but older files for the whole country.
OpenStreetMap keeps a full history of everything, so it is possible to extract even more fine-grained snapshots – say for the 1st of each month since 2014! This will require the “osmium” utility (with its –time-filter option), as well as a “full history” file. Such files are available (for the whole world) from planet.openstreetmap.org, but also for individual continents or countries from our project-internal download server. (Because these files contain metadata that may be personal data, access is only allowed with an OSM login.)
There are a number of caveats that apply to working with historic OSM data though. First and foremost: An OSM data set of time X tells you what OSM knew about the world at that time – and not what the world was like at that time. If a building has been there for 100 years but was only added to OSM in 2020, then the 2018 data set will not contain that building. You can get an idea of what to expect in an old OSM data set from the “chronology” tab of the taginfo service (globally at taginfo.openstreetmap.org, or for individual regions at taginfo.geofabrik.de). Here’s a graph of the “building” tag for Spain:
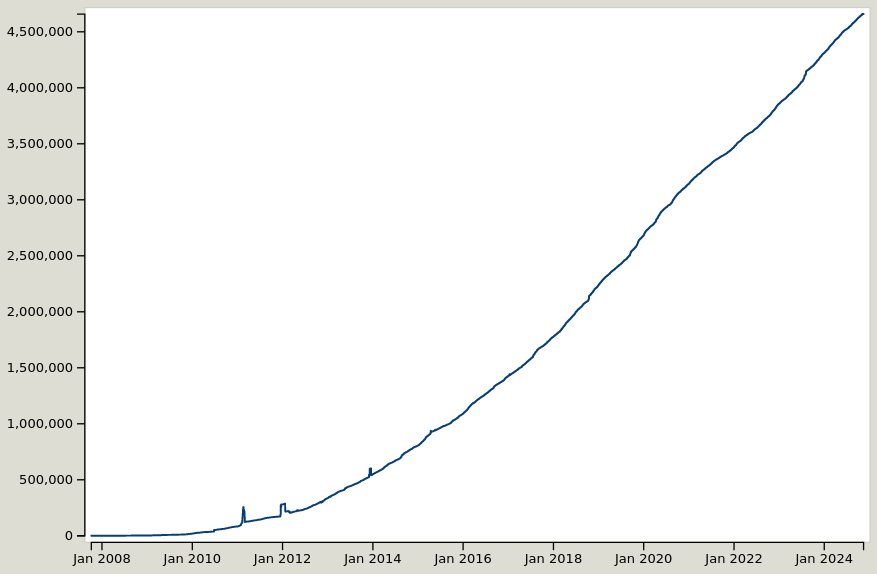
As you can see, OSM currently has about 4.5 million building objects in Spain, and in 2014 we had about 450,000. Does that mean that 90% of Spain’s buildings have been erected in the last 10 years? No – it only means that OSM was much smaller in 2014 than it is today!
Because OpenStreetMap was invented in 2004, obviously any data export for any time before 2004 will be completely empty. In the early years we also had a few incompatible data model changes, and the license change in 2012 meant that some data had to be removed again. So, going back further than the license change will really give you very patchy results, and is not recommended for most use cases.
Another thing to consider is that in some areas the mapping methods have changed, and something that was mapped as X in 2014 might today be Y. Depending on what research you are doing, it might be necessary to adapt your filters to that.
If you would like to enlist our help in extracting historic information from OpenStreetMap, we’re happy to make you an offer.